




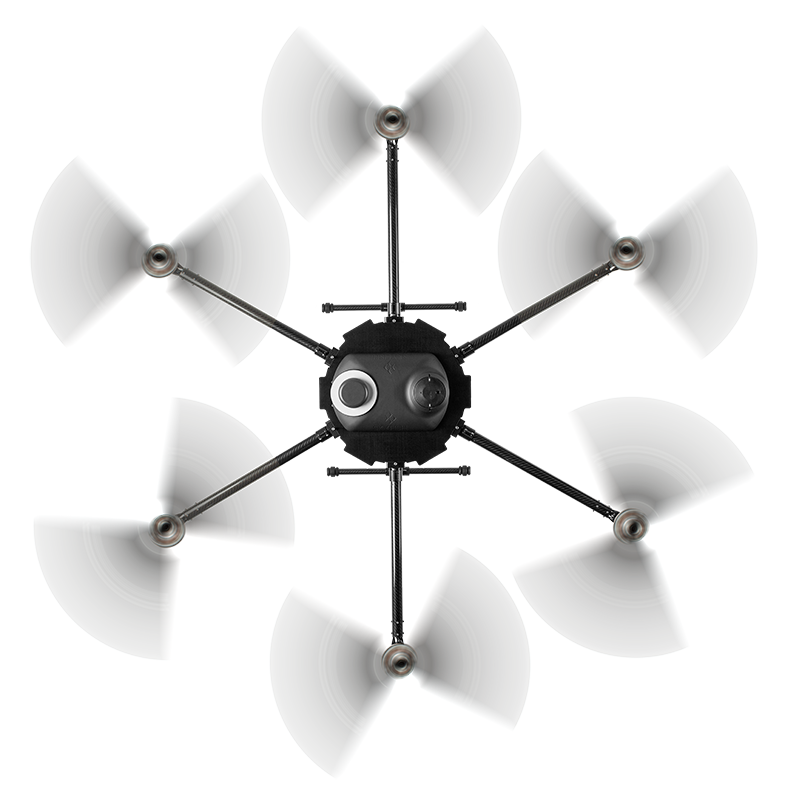



Về máy bay M6 của Skyfish
- Máy bay không người lái Skyfish M6 chuyên dùng cho các ứng dụng công nghiệp và tải trọng nặng, bao gồm điện quang, nhiệt và rô bốt. M6 có thể thực hiện các tác vụ cụ thể đòi hỏi kết quả hiệu quả, có thể lặp lại và chính xác. Ví dụ như: kiểm tra cơ sở hạ tầng, khảo sát, đo đạc chính xác, lập bản đồ và thu thập dữ liệu không gian địa lý.
- Máy bay không người lái Skyfish M6 được thiết kế để theo dõi và đo ở cấp độ kỹ thuật, chuyên trở các thiết bị tự động, giám sát và phân tích nhiệt, và lập mô hình 3D.
- M6 có thể được cấu hình hoá với nhiều loại cảm biến hay các thiết bị robot và có thể được lập trình từ xa để bay tự động ngoài tầm quan sát (BVLOS) và các quỹ đạo giám sát phức tạp.
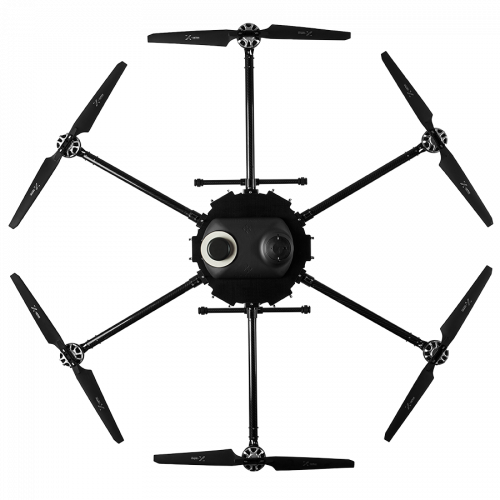
- Skyfish M6 có 6 động cơ, 4 hay 6 bộ pin trên thân máy, M6 có thể thực hiện với các tải trọng nặng và thường bay thực hiện dự án trong một lần.
- Các đặc điểm nổi bật của M6:
+ Hệ thống tự bay với radar chủ động cho cất và hạ cánh, trở lại bệ phóng thông minh (RTL), và lập kế hoạch bay phức tạp với các cảm biến kích hoạt.
+ Tản nhiệt bằng làm mát chủ động.
+ RF được gia cố (RF được che chắn) để bảo vệ tối ưu tín hiệu.
+ Di chuyển dễ dàng với tính năng "Pack and Go", cánh máy bay bằng carbon polymer gập lại được và các cánh tay có thể mở ra.
+ Hệ thống RTK (Real-time kinematic) tích hợp ăngten phẳng gắn ngoài dự phòng. Độ chính xác đến từng centimet để giữ chắc chắn được vị trí và độ cao.
+ Có sẵn tính năng tránh va chạm cho những không phận phức tạp với khả năng bị từ chối GPS và và tích hợp đầy đủ bản đồ Esri/Google mapwith.us.
+ Đo từ xa được mã hoá và truyền video tỏng phạm vi 5 dặm (khoảng 8 km).
+ Bộ pin Li-ion chất lượng cao với > 500 lần sạc. Bộ pin dễ dàng tháo và hoán đổi.
+ Bộ điều khiển từ xa bền bỉ, được hàn kín, chống chịu với mọi thời tiết, màn hình LCD chống va đập.
................................................................................................................................................................................................................................................................................................................................................................................................................
..............................................................................................................................................................................................................................................................................................................................................................................................................
Thân máy bay
- Kích thước máy bay:
+ Chưa gập: 170 x 170 x 56,6 cm
+ Đã gập: 63,2 x 63,2 x 57 cm
- Trọng lượng rỗng: 7,6 kg
- Trọng lượng cất cánh tối đa: 23,36 kg
- Tốc độ tối đa:
+ S mode: 65 mph (104,5 km/h)
+ P mode: 38 mph (61 km/h)
+ A mode: 51,4 mph (82,7 km/h)
- Tốc độ nâng/hạ tối đa: 16,4 ft/s (5 m/s)
- Góc ngẩng tối đa: 45o
- Chế độ bay: thủ công, lòng vòng, theo chỉ dẫn, ổn định, trở lại nơi xuất phát, các chế độ tuỳ chỉnh.
- GPS: có sẵn trên RTK, anten phẳng gắn ngoài dự phòng.
- Kiến trúc hệ thống: bo mạch chủ
Máy & động cơ
- Số động cơ: 6
- Công suất liên tục tối đa của động cơ: 200 W
- Công suất tức thời tối đa của động cơ: 250 W (5 giây)
- Đẳng lượng KV: 330 rpm/V
- Nguồn trên thân máy: lập trình đầu ra (1 - 14 V, 2,5 A)
Môi trường hoạt động
- Nhiệt độ môi trường vận hành: -17,8 ℃ ... +46 ℃
- Trần bay so với mực nước biển (ASL): 4.200 m
- Trần bay so với mặt đất (AGL): 600 m
Cánh máy bay
- Vật liệu: Carbon Polymer
- Kích thước: dài 55 cm, nghiêng 7,2o
- Định hướng: 3 x CW, 3 x CCW (CW: clockwise, CCW: counter-clockwise)
Bộ điểu khiển từ xa
- Kiểu dáng: Máy tính bảng Toughbook™ của Panasonic được bọc, hệ điều hành Windows 10, tích hợp lẫy điều khiển, công tắc có thể lập trình 2 và 3 chiều, công tắc có mũ có thể khoá được và nhiều các tuỳ chọn khác.
- Màn hình: 10,1"
- Độ bền: LCD bảo vệ va đập, được hàn kín cho mọi thời tiết, rơi 4 ft (1,2 m), chống sốc và bền với rung động (Chứng nhận tiêu chuẩn MIL-STD-810G và IP65)
Máy tính trên thân máy Skymind™
- Trọng lượng: 40 g
- Cất và hạ cánh: tự động
- Tầm nhìn của máy tính: đã có trên máy.
- Bám địa hình: SRTM (Shuttle Radar Topography Mission)
- Mạng trên máy: Ethernet (100 Mb).
- Đặc điểm đặc biệt: hệ thống chiếu hình học thời gian thực để lập bản đồ các đối tượng xem camera.
- Các hành vi an toàn:
+ An toàn khi điện áp thấp.
+ Các vấn đề về kết nối liên lạc với drone
+ Thông báo cho phi công
+ Các hành động tự động tuỳ chọn: bay lơ lửng, trở lại bệ phóng, hạ cánh.
+ Các tuỳ chọn an toàn để kết hợp và tuỳ chỉnh với các quy trình riêng.
- Chia sẻ dữ liệu tại hiện trường: cả nhóm có thể xem theo thời gian thực tại hiện trường.
Pin
- Số lượng bộ pin: 4 bộ
- Dung lượng pin: 520 Wh cho mỗi bộ
- Thế pin tối đa: 25 V
- Thế pin định danh: 18 V
- Chu kỳ sạc: > 500 lần sạc mỗi bộ
- Các đầu nối với pin: XT-90 chống đánh lửa.
Thời gian bay
- Thời gian bay phụ thuộc vào tải trọng.
- Tốc độ bay: 104 km/h
- Với trọng lượng rỗng (chỉ có máy bay): 52 phút
- Tải trọng 2 kg (4,55 lbs): 37 phút
- Tải trọng 5,4 kg (12 lbs): 30 phút
Khả năng tuỳ chỉnh
- Tuỳ chỉnh giao diện của cảm biến (Sensor API): Skyfish có thể tích hợp các camera Alpha và QX Series của Sony, của FLIR và các thiết bị ảnh nhiệt khác, các cảm biến RICO, LiDAR, camera hồng ngoại, các thiết bị robot, các hệ thống phát thải và nhiều hơn nữa.
- Lập kế hoạch bay: với Skyfish Mission Control™ hay KML, KMZ và nhập geo-PDF.
- Kết nối USB: để tích hợp các firmware tuỳ chỉnh và cập nhật phần mềm.
- Tích hợp với các phần mềm như Benley để lập mô hình 3D, Pix4D để lập bản đồ, và nhiều hơn nữa.
- Tuỳ chỉnh các công tắc, cần điều khiển và các phím trên bộ điều khiển từ xa của Skyfish.
- Tạo, lưu dữ, chia sẻ các mô hình 3D, bảo đồ, các ảnh gắn ví trí địa lý và các video theo theo gian.
- Truy xuất các mô hình và bản đồ tạo lập bởi Skyfish vào các nền tảng Esri, Google, CAD và các chương trình khác
................................................................................................................................................................................................................................................................................................................................................................................................................
..............................................................................................................................................................................................................................................................................................................................................................................................................